
- Thread Starter
- #1
Autonomous Robots: Nonholonomic Motion Planning Algorithms
Published 4/2023
MP4 | Video: h264, 1280x720 | Audio: AAC, 44.1 KHz
Language: English | Size: 2.24 GB | Duration: 3h 22m
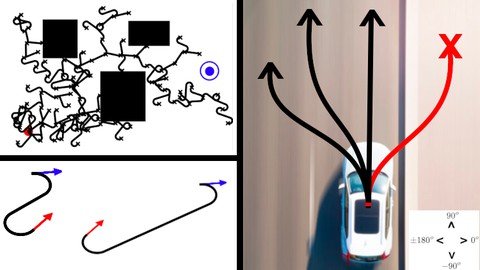
Learn the how to calculate smooth vehicle trajectories, and combine this with sampling based motion planning!
What you'll learn
Learn the Dubins Curve algorithm for smooth trajectory generation between two waypoints on a map.
Calculate a path using the Rapidly Exploring Random Trees (RRT) and RRT* algorithms combined with Dubins curves.
Learn the basics of incremental path planning for real time applications.
Determine a path using Incremental RRT with Dubins curves, and analyze your results quantitatively.
Requirements
No programming experience needed. I will teach you everything from scratch.
It is recommended that students have Python 3.9.x, Numpy 1.23.x and Matplotlib 3.x ready for the assignments.
")